Overview
 Robot Servo Control Solution ensures simple and powerful robotic automation. Robot Servo Control Solution integrated with NexCOBOT robot controller, 3rd party EtherCAT servo drive and NexCOBOT EtherCAT digital I/O together in a compact cabinet. It is designed for small payload robots such as SCARA robot, Delta robot and qualified 6 axis articulated robot. It integrated with CoolDrive RC EtherCAT servo drive, supported the motors with Tamagawa encoder.
Robot Servo Control Solution ensures simple and powerful robotic automation. Robot Servo Control Solution integrated with NexCOBOT robot controller, 3rd party EtherCAT servo drive and NexCOBOT EtherCAT digital I/O together in a compact cabinet. It is designed for small payload robots such as SCARA robot, Delta robot and qualified 6 axis articulated robot. It integrated with CoolDrive RC EtherCAT servo drive, supported the motors with Tamagawa encoder.
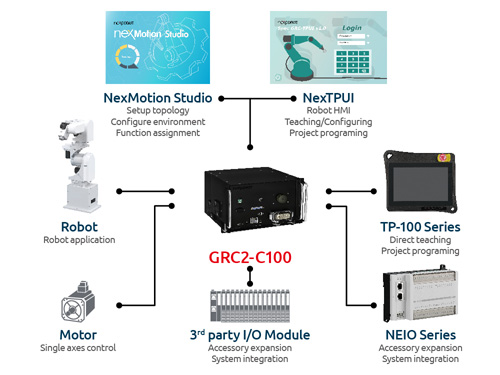
Robot Servo Control Solution provides the powerful configuration tool ”NexMotion Studio”, which users can configure EtherCAT topology, devices, robot parameters, extend axis control and extend more I/O devices. Robot Servo Control Solution provides “NexTPUI”, which is a HMI for teach pendant to operate robots easily. NexTPUI provides multi-function such as robot jogging, I/O control, status monitoring and project programming. NexTPUI provides simple programming language NRPL (NexMotion Real-Time Programming Language) which is a C-like language. In different application scenarios, users can easily program their tasks without much programming knowledge.
For the Industry 4.0, Robot Servo Control Solution provides a general-purpose robot controller that supports standard EtherCAT communication. With the powerful software, it can freely configure any number of robot control axis joint modules according to the needs of the application and can also freely expand external modules. The number of groups, such as IO modules, can meet the needs of multiple application environments and provide high degrees of freedom for any application and integration.
Specifications
| Model |
|
|
| Power Input |
|
|
| Supported Motor Watt |
- J1~J3: Max. 1000W
J4~J6: Max. 500W
|
|
Supported Encoder Interface/ Motor
|
- Tamagawa Encoder/ Tamagawa servo motor
|
|
Supported Robot Group
|
- Default: 1 Group, Maximum up to 2 Groups (Optional)
|
|
EtherCAT Port
|
|
|
Supported Hardware
|
|
|
Supported Software
|
- NexMotion Studio, NexTPUI (Pre-installed)
|
|
Add-on Solution Package
|
- Conveyor Tracking/ Multi-Robot/ Multi-Task
|
|
Dimensions
|
- 394 mm(W) x 337mm (D) x 251mm (H)
|
|
Weight
|
|
|
Communication
|
- 1 x GbE / Modbus TCP, NexTPUI remote control
|
|
I/O Interface
|
- 1 x VGA (1920 x 1200@60Hz)
1 x HDMI (4096x2160 @24Hz, 24 bpp)
2 x USB 3.0
4 x USB 2.0
1 x RS232/422/485 with auto flow control
2 x I211AT GbE LAN (one port can be PoE port, IEEE 802.3af compliant, need optional PSE board)
Digital I/O: 16in/ 16out
|
|
Environment
|
- Operating temperature: -5°C to 55°C
Storage temperature: -20°C to 80°C
Relative humidity: 10% to 95% (non-condensing)
Shock protection:
HDD: 20G, half sine, 11ms, IEC60068-27
CFast: 50G, half sine, 11ms, IEC60068-27
|
|
Certifications
|
|
|